







کاٻي هٿ جو قاعدو ، ساڄي هٿ جو قاعدو ، ساڄي هٿ جو قاعدو.کاٻي هٿ جي حڪمراني، هي موٽر گردش جي قوت جي تجزيو لاء بنياد آهي.سادي لفظ ۾، اهو مقناطيسي ميدان ۾ موجوده کڻندڙ موصل آهي، جيڪو زور سان متاثر ٿيندو.
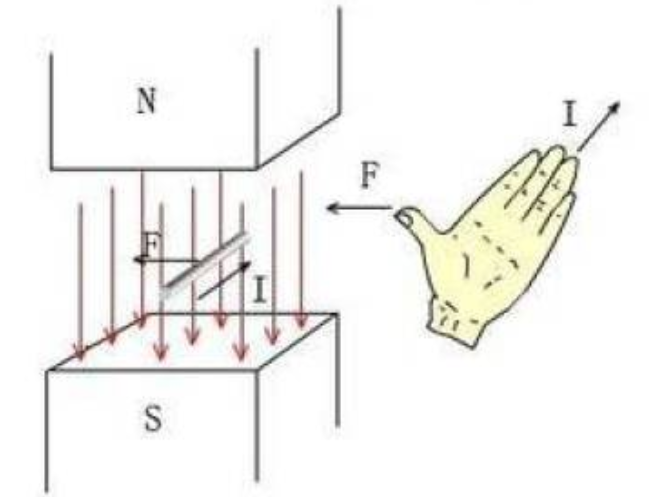
اچو ته مقناطيسي فيلڊ لائن کي کجيء جي سامهون مان گذري، آڱرين جي هدايت ڪرنٽ جي هدايت آهي، ۽ آڱر جي هدايت مقناطيسي قوت جي هدايت آهي.قوت جو ڪشش مقناطيسي فيلڊ لائنن کي ڪٽي ٿو ته برقي قوت پيدا ڪرڻ لاء.
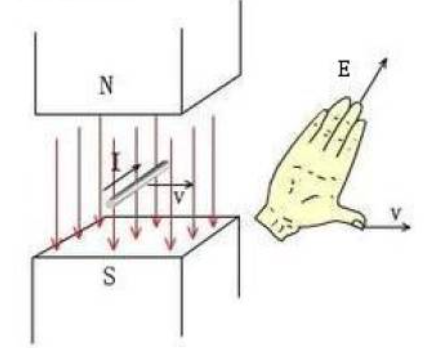
مقناطيسي فيلڊ لائين کي ھٿ مان گذرڻ ڏيو، آڱر جي ھدايت حرڪت جي ھدايت آھي، ۽ آڱر جي ھدايت پيدا ٿيل برقي قوت جي ھدايت آھي.ڇو حوصلا افزائي برقي قوت بابت ڳالهايو؟مون کي خبر ناهي ته توهان وٽ ڪو اهڙو تجربو آهي.جڏهن توهان موٽر جي ٽن مرحلن واري تارن کي گڏ ڪندا ۽ موٽر کي هٿ سان ڦيرايو، توهان کي معلوم ٿيندو ته مزاحمت تمام وڏي آهي.اهو ئي سبب آهي ته انڊڪشن موٽر جي گردش دوران ٿئي ٿي.اليڪٽرروموٽو قوت ڪرنٽ پيدا ڪري ٿي، ۽ مقناطيسي ميدان ۾ موصل ذريعي وهندڙ ڪرنٽ گردش جي رخ جي سامهون هڪ قوت پيدا ڪندو، ۽ هرڪو اهو محسوس ڪندو ته گردش جي خلاف تمام گهڻي مزاحمت آهي.
ٽن مرحلن واري تارن کي الڳ ڪيو ويو آهي ۽ موٽر کي آساني سان تبديل ڪري سگهجي ٿو
ٽي-مرحلي لائينون گڏيل آهن، ۽ موٽر جي مزاحمت تمام وڏي آهي.ساڄي هٿ جي اسڪرو جي قاعدي موجب، ساڄي هٿ سان توانائيءَ واري سولينائيڊ کي پڪڙيو، ته جيئن چار آڱريون ساڳي طرف موڙي وڃن، جيئن ڪرنٽ، پوءِ انگوٺ جي طرف اشارو ڪيل آخر آهي توانائي واري سولينائيڊ جو N قطب.
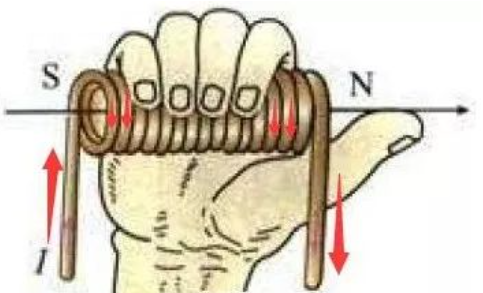
هي قاعدو توانائيءَ واري ڪوئلي جي قطبيت کي جانچڻ جو بنياد آهي، ۽ ڳاڙهي تير جو رخ موجوده طرف آهي.ٽن ضابطن کي پڙهڻ کان پوء، اچو ته موٽر گردش جي بنيادي اصولن تي هڪ نظر رکون.پهريون حصو: ڊي سي موٽر ماڊل اسان هڪ ڊي سي موٽر جو هڪ ماڊل ڳوليندا آهيون جنهن جو اڀياس هاءِ اسڪول فزڪس ۾ ڪيو ويو آهي، ۽ مقناطيسي سرڪٽ جي تجزياتي طريقي سان هڪ سادي تجزيي کي منظم ڪيو.
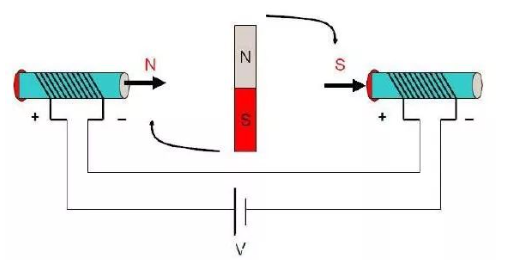
اسٽيٽ 1 جڏهن ڪرنٽ ٻنهي سرن تي ڪنڊن تي لاڳو ڪيو ويندو آهي، ساڄي هٿ جي اسڪرو قاعدي جي مطابق، هڪ لاڳو ٿيل مقناطيسي انڊڪشن شدت B (جيئن ٿلهي تير جي ذريعي ڏيکاريل آهي) ٺاهي ويندي، ۽ وچ ۾ روٽر ٺاهڻ جي ڪوشش ڪندو. ان جي اندروني مقناطيسي انڊڪشن لائن جي هدايت جيتري ممڪن حد تائين.ٻاهرين مقناطيسي فيلڊ لائن جي طرف هڪ مختصر بند مقناطيسي فيلڊ لائن لوپ ٺاهڻ لاءِ هڪجهڙائي رکي ٿي، ته جيئن اندروني روٽر ڪلاڪ جي طرف گھمندو.جڏهن روٽر جي مقناطيسي فيلڊ جو رخ ٻاهرين مقناطيسي فيلڊ جي هدايت ڏانهن عمودي آهي، روٽر جي گردش واري ٽوڪ سڀ کان وڏي آهي.ياد رهي ته ”لمح“ کي چيو ويندو آهي سڀ کان وڏو، نه ”قوت“.اهو صحيح آهي ته جڏهن روٽر جي مقناطيسي ميدان ساڳئي طرف آهي ته ٻاهرئين مقناطيسي ميدان، روٽر تي مقناطيسي قوت سڀ کان وڏي آهي، پر هن وقت روٽر افقي حالت ۾ آهي ۽ قوت بازو 0 آهي، ۽ يقينن اهو گردش نه ڪندو.شامل ڪرڻ لاء، لمحو قوت ۽ قوت بازو جي پيداوار آهي.جيڪڏهن انهن مان هڪ صفر آهي، پيداوار صفر آهي.جڏهن روٽر افقي پوزيشن ڏانهن رخ ڪري ٿو، جيتوڻيڪ اهو هاڻي گھمڻ واري ٽوڪ کان متاثر نه ٿيندو آهي، اهو انارٽيا جي ڪري ڪلاڪ جي طرف گھمندو رهندو.هن وقت، جيڪڏهن ٻن solenoids جي موجوده هدايت کي تبديل ڪيو وڃي، جيئن هيٺ ڏنل شڪل ۾ ڏيکاريل آهي، روٽر گردش جاري رکندو.گھڙيءَ جي رخ ۾ اڳتي،
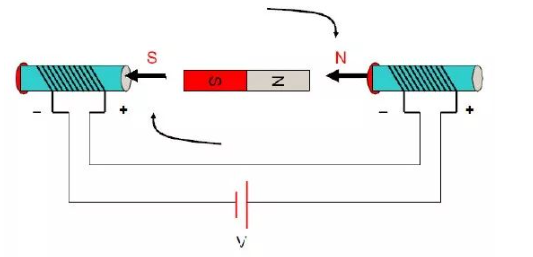
رياست 2 ۾، ٻن solenoids جي موجوده هدايت مسلسل تبديل ٿي وئي آهي، ۽ اندروني روٽر کي گھمڻ جاري رهندو.ڪرنٽ جي رخ کي تبديل ڪرڻ واري عمل کي ڪميوٽيشن چئبو آهي.هڪ طرفي نوٽ: جڏهن ڪم ڪرڻ لاء صرف روٽر جي پوزيشن سان لاڳاپيل آهي ۽ سڌو سنئون ڪنهن ٻئي مقدار سان لاڳاپيل ناهي.حصو 2: ٽي-مرحلي ٻه-قطب اندروني روٽر موٽر عام طور تي ڳالهائڻ، اسٽيٽر جي ٽن مرحلن واري وائنڊنگ ۾ اسٽار ڪنيڪشن موڊ ۽ ڊيلٽا ڪنيڪشن موڊ، ۽ "ٽي-فيز اسٽار ڪنيڪشن جو ٻه-ٻه ڪنيڪشن موڊ" سڀ کان وڌيڪ عام آهي. استعمال ڪيو ويو، جيڪو هتي استعمال ڪيو ويو آهي.هي ماڊل هڪ سادي تجزيي لاء استعمال ڪيو ويندو آهي.
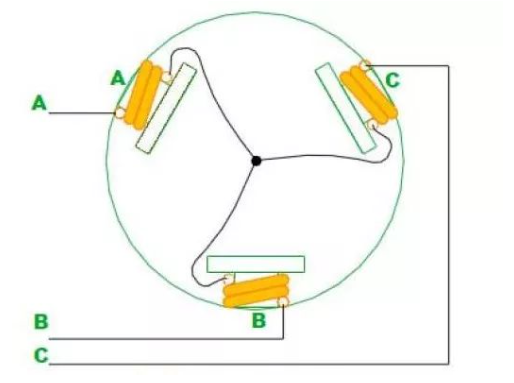
مٿي ڏنل انگ اکر ڏيکاري ٿو ته اسٽيٽر وائنڊنگز ڪيئن جڙيل آهن (روٽر کي فرضي ٻن قطب مقناطيس جي طور تي نه ڏيکاريو ويو آهي)، ۽ ٽي وائنڊنگ مرڪزي ڪنيڪشن پوائنٽ ذريعي هڪ "Y" شڪل ۾ ڳنڍيل آهن.سڄو موٽر ٽن تارن A,B,C ڏانهن وٺي وڃي ٿو. جڏهن اهي ٻه ٻه ڪري توانائي ڏين ٿيون ته 6 صورتون آهن، يعني AB, AC, BC, BA, CA, CB.نوٽ ڪريو ته هي ترتيب ۾ آهي.
هاڻي آئون پهرين اسٽيج تي نظر اچي ٿو: AB مرحلو متحرڪ آهي
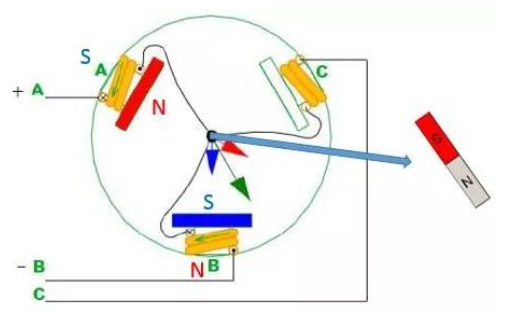
جڏهن AB مرحلي کي متحرڪ ڪيو وڃي ٿو، A قطب جي ڪنڊ ذريعي پيدا ٿيندڙ مقناطيسي فيلڊ لائن جي هدايت ڳاڙهي تير سان ڏيکاريل آهي، ۽ B قطب پاران ٺاهيل مقناطيسي فيلڊ لائن جي هدايت نيري تير سان ڏيکاريل آهي، پوء هدايت نتيجي ۾ پيدا ٿيندڙ قوت کي سائي تير جي ذريعي ڏيکاريو ويو آهي، پوء اهو فرض ڪيو ته اتي هڪ ٻه-قطب مقناطيس آهي، N-قطب جي هدايت سائي تير جي ڏيکاريل هدايت سان ٺهڪي اچي ٿي، مطابق "وچ ۾ روٽر رکڻ جي ڪوشش ڪندو. ان جي اندروني مقناطيسي فيلڊ لائنن جي هدايت، خارجي مقناطيسي فيلڊ لائنن جي هدايت سان مطابقت رکي ٿي.جيئن ته سي لاء، هن وقت تائين هن سان ڪجهه به ناهي.
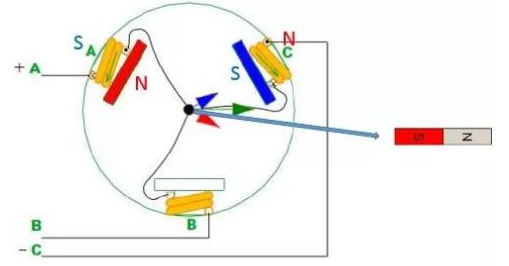
اسٽيج 2: AC مرحلو توانائي
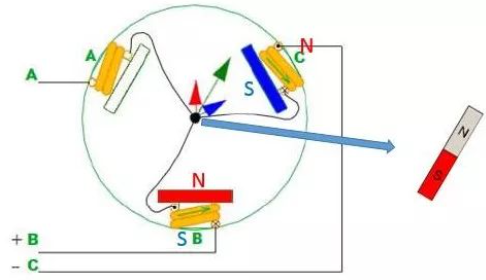
ٽيون مرحلو: BC مرحلو بجليءَ جو
ٽيون مرحلو: بي اي مرحلو متحرڪ آهي
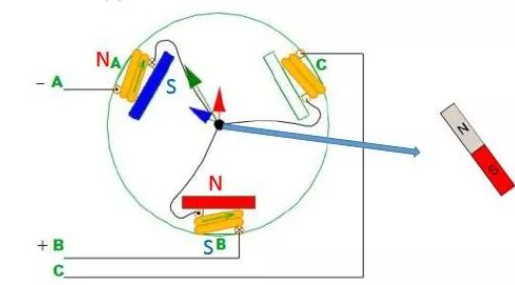
هيٺيون وچولي مقناطيس (روٽر) جو رياستي خاڪو آهي: هر عمل روٽر 60 درجا گھمائيندو آهي

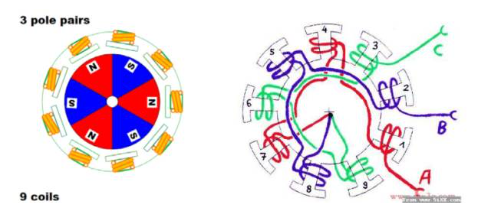
مڪمل گردش ڇهن عملن ۾ مڪمل ٿئي ٿي، جن مان ڇهه ڪميونٽيشن ڪيا ويا آهن.ٽيون حصو: ٽي مرحلو ملٽي وائنڊنگ ملٽي پول انر روٽر موٽر اچو ته ڏسون وڌيڪ پيچيده نقطي تي.شڪل (a) هڪ ٽن مرحلن واري نو-وائنڊنگ ڇهه-قطب (ٽي-مرحلو، نو-وائنڊنگ، ڇهه-قطب) موٽر آهي.سامهون قطب) اندروني روٽر موٽر، ان جو وائنڊنگ ڪنيڪشن شڪل (ب) ۾ ڏيکاريل آهي.شڪل (b) مان ڏسي سگهجي ٿو ته ٽن مرحلن واري وائنڊنگ به وچولي نقطي تي هڪٻئي سان ڳنڍيل آهن، جيڪو پڻ هڪ اسٽار ڪنيڪشن آهي.عام طور تي، موٽر جي وائننگن جو تعداد مستقل مقناطيسي قطبن جي تعداد سان مطابقت نه رکي ٿو (مثال طور، 9 وائنڊنگز ۽ 6 پولز جي بدران 6 وائنڊنگز ۽ 6 پولز استعمال ڪيا ويا آهن)، جيئن ته اسٽيٽر جي ڏندن کي روڪڻ لاء. روٽر جي مقناطيس کي راغب ڪرڻ ۽ ترتيب ڏيڻ کان.
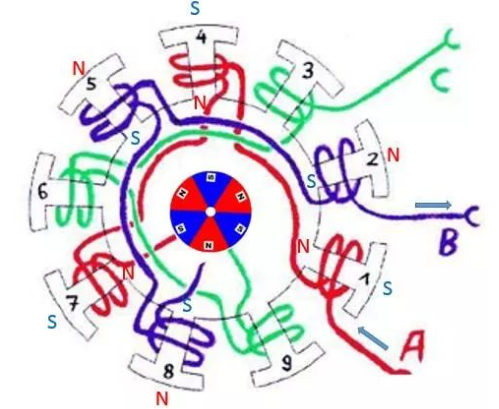
ان جي حرڪت جو اصول هي آهي ته: روٽر جو N قطب ۽ توانائيءَ واري وائننگ جو S قطب، ۽ روٽر جو S قطب ۽ توانائيءَ واري وائننگ جو N قطب هڪ ترتيب ڏيڻ جو رجحان رکي ٿو.اهو آهي، S ۽ N هڪ ٻئي ڏانهن راغب.ياد رهي ته اهو اڳئين تجزيي جي طريقي کان مختلف آهي.خير، اچو ته توهان کي ٻيهر تجزيو ڪرڻ ۾ مدد ڪريون.پهريون مرحلو: AB مرحلو برقي آهي
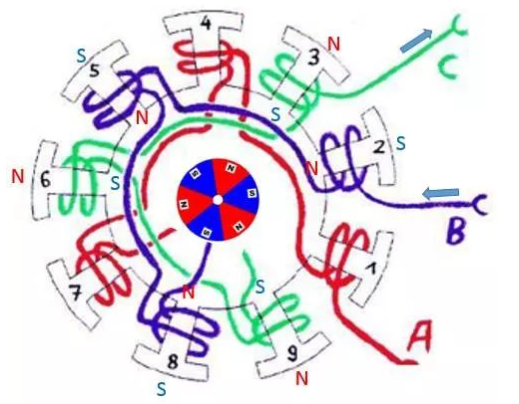
اسٽيج 2: AC مرحلو توانائي

ٽيون مرحلو: BC مرحلو بجليءَ جو
پوسٽ جو وقت: آڪٽوبر-21-2022